ECU抽象层负责提供统一的访问接口,实现对通信、内存或者 I/O的访向,主要包括板载设备抽象(Onboard Device Abstraction)、存储器硬件抽象(Memory Hardware Abstraction)、通信硬件抽象(Communication Hardware Abstraction)和I/O硬件抽象(I/O Hardware Abstraction)四个部分。
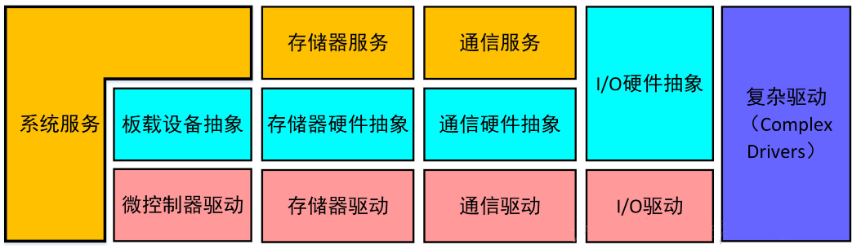
包含ECU板载设备的驱动,这些驱动通过微控制器抽象层(MCAL)对ECU板载设备进行访问。
任务:对特定的ECU板载设备进行抽象;
实现:不依赖于微控制器,依赖于外部设备;
上层接口:不依赖于微控制器,部分依赖于ECU硬件。
存储器硬件抽象包含了一组模块,它能够从外围存储器所在的位置以及ECU硬件层进行抽象。
任务:提供相同的机制以访问内部和外部存储器;
实现:不依赖于微控制器,依赖于外部设备;
上层接口:不依赖于微控制器、ECU硬件和存储器。
(1) FEE
该模块使用Flash存储器来仿真EEPROM功能。FEE对设备特定的寻址方案和划分进行抽象,并且向上层提供虚拟寻址方案和划分,以及“事实上”无限制的擦除循环。
(2) EA
EEPROM抽象同样也对设备特定的寻址方案和划分进行抽象,并且向上层提供虚拟寻址方案和划分,以及“事实上”无限制的擦除循环。
(3) Memlf
存储器接口允许非易失性存储器管理机访问若干个存储器抽象模块(FEE或者EA模块)。存储器接口从下层的FEE或者EA模块进行抽象,并给上层提供线性地址空间的虚拟划分。
通信硬件抽象包含了一组模块,它能从通信控制器和 ECU 硬件层进行抽象。
(1) CanIf
CAN接口位于底层CAN设备驱动(CAN控制器驱动和收发器驱动)和上层的通信服务层(例如网络管理、传输协议等)之间。它由所有独立于CAN硬件的任务组成,是底层设备连接上层通信服务的接口。
CAN接口通过连接PDU路由和上层AUTOSAR通信栈的通信模块,可满足传输请求处理、传输确认/接收指示/错误通知、CAN网络的启动/停止需求。
(2) Linlf
该模块规范了AUTOSAR基础软件模块中的LIN接口(LinIf)和LIN传输协议(LINTransport Protocol,LinTp)的功能、API以及配置。LIN接口独立于硬件,并且也定义了对上层模块(PDU路)和下层模块(LIN驱动)的接口。一个LIN接口可以处理多个LIN驱动,一个LIN 驱动可以处理一个或多个通道。
LIN接口向上层提供LIN2.1主节点的功能,可执行ECU连接的每个 LIN总线的当前所选进程;当上层需要时,可切换进程表;可从上层获取帧传输请求,并作为响应传输数据;当相应的响应被接收时,可向上层提供帧接收通知;可提供睡眠和唤醒服务;可进行错误处理;可提供传输层诊断服务。
I/O硬件抽象包含了一组模块,它能够对外围I/O设备(板载或板级)的位置和ECU硬件层(例如微控制器的管脚等)进行抽象。但I/O硬件抽象无法对传感器或执行器进行抽象。
任务:传递I/O信号,向更高的软件层隐藏ECU硬件及布线的属性;
实现:不依赖于微控制器,依赖于ECU硬件;
上层接口:不依赖于微控制器和 ECU硬件,依赖于根据AUTOSAR规定的信号类型。


服务热线:
0551-65691812